")
")
Control multivariable de sistemas Acoplados. Funciones de tranferencia
Referencias, “Exploring Uncertainties in MIMO Testing”. Sandia National Lab. https://www.osti.gov/servlets/purl/1764765
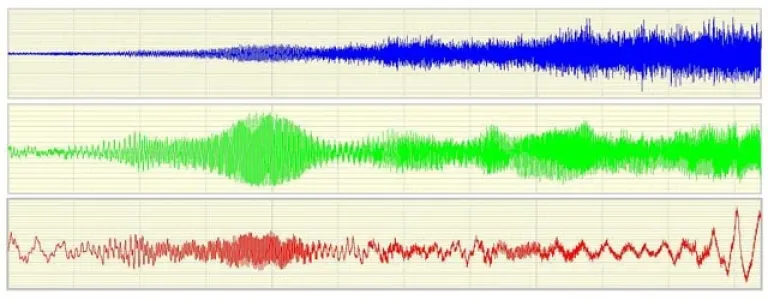
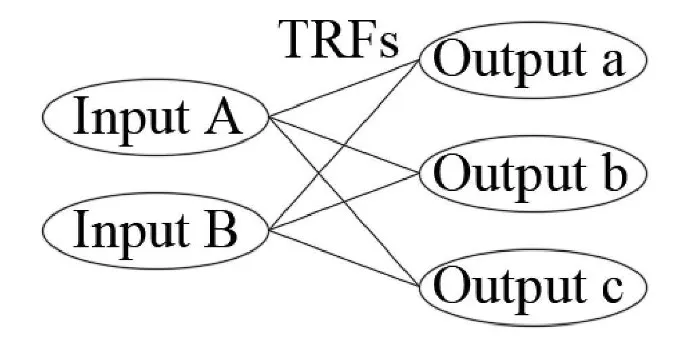
MIMO son las siglas de “Multiple Input & Multiple Output”. La función de transferencia es el conjunto de ecuaciones complejas que relacionan la composición de las entradas para obtener cada salida. La función de transferencia se obtiene aplicando la transformada de Laplace al sistema de ecuaciones diferenciales en el tiempo que definen cada proceso.
Matrices de transformación
Referencia: Applying Coordinate Transformations to Multi Degree of Freedom Shaker Control Marcos A. Underwood, Ph.D. Tony Keller, M.S.E.E.
EJEMPLO: MESA VIBRATORIA 6 GdL con 8 ACTUADORES
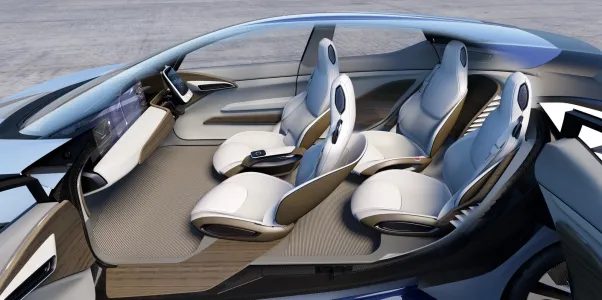
Como aplicación directa a las mesas vibratorias o simuladores sísmicos, supongamos una mesa de cruz movida por un conjunto de 8 actuadores hidráulicos, como muestra la figura inferior:
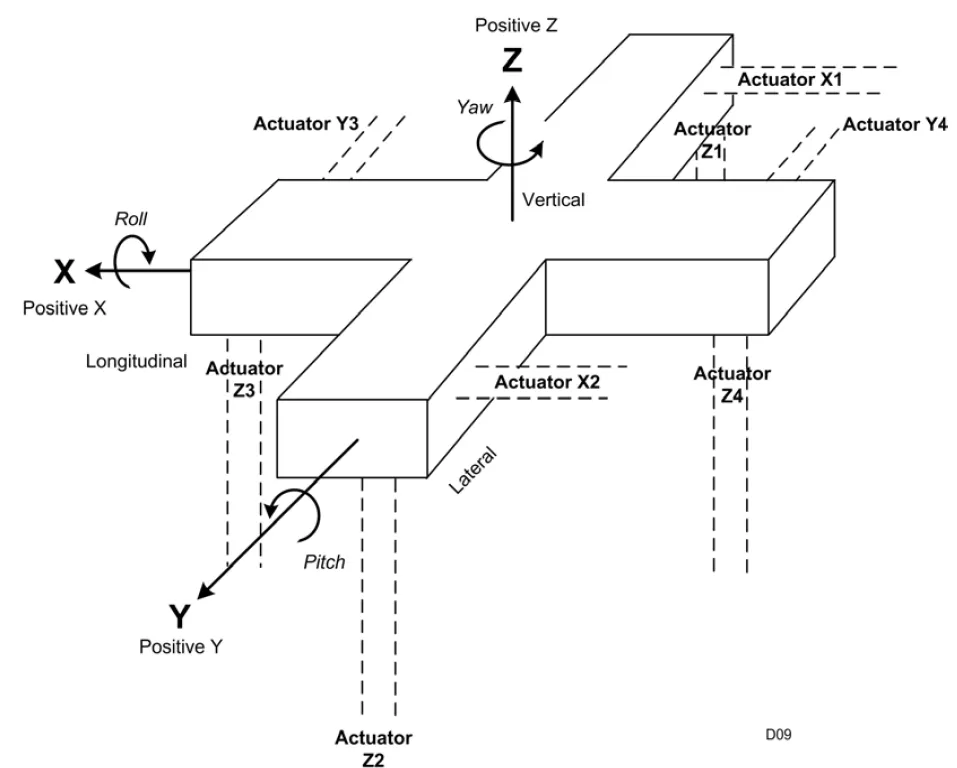
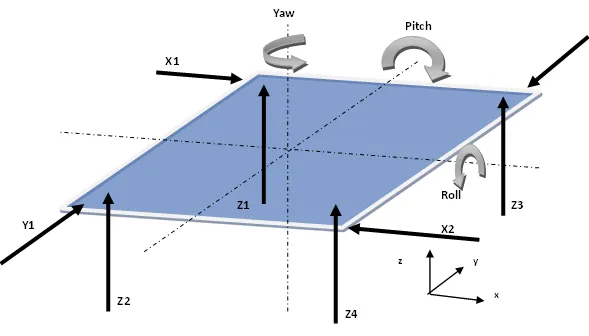
Como puede verse, cada uno de los grados de libertad de movimiento, requiere del movimiento de todos y cada uno de los actuadores, debido a su acoplamiento cinemático.
Los GdL son XYZ, RX, RY y RZ y se aprecia que cada GdL requiere de la aportación de los 8 actuadores. La definición de cada grado de libertad, se compone del siguiente producto matricial.
Matriz de Transformación de Entradas
Independientemente de los signos que se establezcan y donde se sitúe el el origen de las coordenadas, de forma inicial, los GdL vienen definidos por:
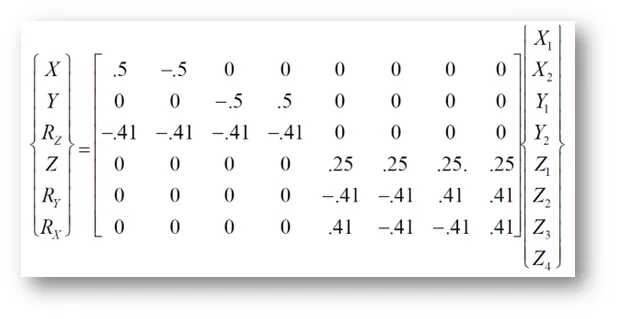
En este caso se supone que las traslaciones son únicamente aportadas por los actuadores de cada eje, porque se ha considerado despreciable las aportaciones que puede surgir, del acoplamiento geométrico entre los ejes, al ser valores proporcionales a los cosenos de los ángulos que deben formar los ejes transversales al movimiento principal.
Matriz de Transformación de Salidas
De la misma manera, cuando el sistema quiere dar una orden de movimiento en cualquier GdL, esa consigna debe descomponerse para que se muevan los actuadores lo que le corresponda a cada uno. Esta transformación de GdL a cada actuador, tiene la siguiente forma:
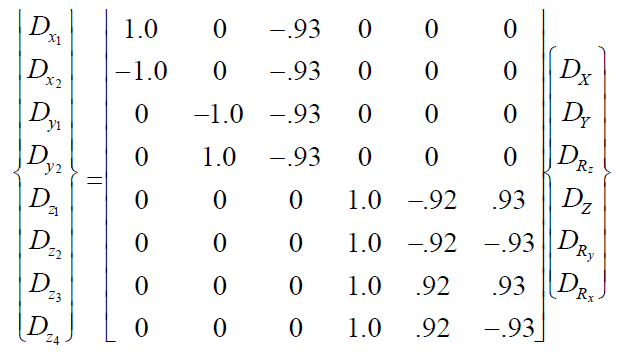
Al igual que en las entradas, se ha considerado despreciables los movimientos debidos al acoplamiento angular.
Sin entrar en mayor profundidad, se puede apreciar la primera capa de complejidad de los sistemas de control para este tipo de sistemas.
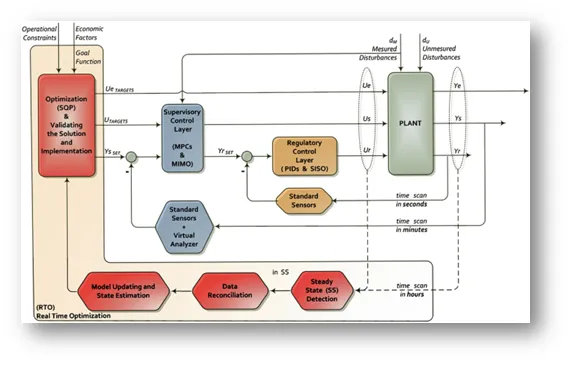
Control basado en modelo
Por todo lo visto anteriormente, los sistemas de control de este tipo de mesas vibratorias son muy complejo, y el proceso de identificación, depuración y optimización del modelo es muy laborioso, pero afortunadamente los avances tecnológicos de la ultima década ayudan de manera fundamental en ese proceso. El proceso de identificación del sistema y la optimización del modelo es algo laborioso y requiere sucesivas iteraciones, como muestra la figura siguiente: Ref: https://link.springer.com/referenceworkentry/10.1007/978-3-030-44184-5_243
 |
 |
Tecnología y Conocimiento técnico